国土交通省の「宇宙無人建設革新技術開発推進事業」において「月面適応のためのSLAM自動運転技術の開発」が採択
2023年1月13日
大成建設株式会社
大成建設株式会社(社長:相川善郎)とパナソニックアドバンストテクノロジー株式会社(社長:水野勇介)は、「月面適応のためのSLAM自動運転技術※1の開発」に関する研究を開始します。本研究は、国土交通省が実施する「宇宙無人建設革新技術開発推進事業」における「月面等での建設活動に資する無人建設革新技術開発推進プロジェクト※2」として採択されたものです。
国土交通省は、宇宙利用探査において世界に先駆けて月面拠点建設を進めるために、遠隔あるいは自動の建設技術(無人化施工等)を重要な要素と位置付けており、これまで風水災害・火山災害を克服してきた日本の無人化施工技術が国際的にも強みを有するとしています。
また、近年激甚化する災害に備えた国土強靭化や人口減少に伴う就労者不足を踏まえ、国土交通省は建設現場での無人化施工技術の更なる高度化と現場普及は喫緊の課題であるとし、これらの建設技術について、アルテミス計画等を通じて月面環境に係るノウハウを有する文部科学省と連携し、月面拠点建設へ適応するための技術開発を進めるとともに、地上の事業への波及が必要であるとしています。
そこで当社は、これまで開発してきたSLAM自動運転技術「T-iDraw Map※3」を活用して、さらなる高度化に向けた技術開発を進め、上記の国土交通省推進プロジェクトの無人建設(自動化、遠隔化)に係る技術に対して「月面環境に適応するSLAM自動運転技術の開発」を提案した結果、この度採択されたため、本研究を開始します。
測位衛星システムがない月面環境での無人による作業を実現するためには、建設機械の位置情報を正確に取得する必要があります。本研究では、SLAM自動運転技術「T-iDraw Map」において、環境情報を活用するLiDAR-SLAM技術と人工的な特徴点を活用する「ランドマークSLAM技術※4」を統合し、月面のような特殊な環境に適応可能な自動運転技術の構築を目指します。月面での自動運転実現には、月面を模した仮想環境での試験やシミュレーションが重要となるため、仮想環境において月面地形を構築したのち、様々なバリエーションのマーカを配置し、建設機械を走行させることで、センシング性能、自己位置推定性能を検証します。
今後、当社は各種シミュレーションに加え、SLAM技術の実現可能性や施工性などを検証するための月面を模した環境での実証実験を通じて、建設機械の位置情報を正確に取得して自動運転を実現するための技術の確立に向け、さらなる研究開発を推進してまいります。
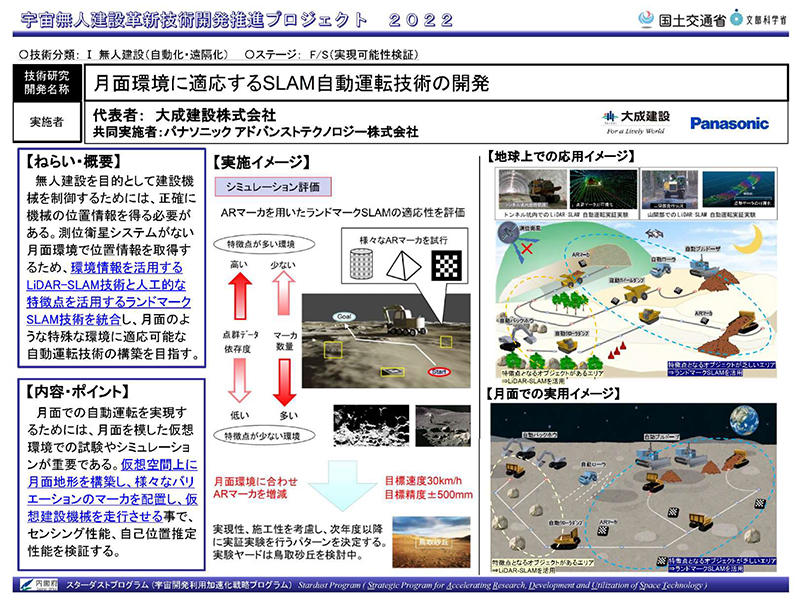
図1 月面等での建設活動に資する無人建設革新技術開発推進プロジェクト採択概要
- ※1
SLAM自動運転技術
SLAMはSimultaneous Localization And Mappingの略称。移動体が「センシングによって得た計測値」と「移動することで得た計測値」を照らし合わせ、その誤差を収束計算することで、自己位置推定と環境地図作成を同時に行いう技術。 - ※2
公募対象
https://www.mlit.go.jp/report/press/sogo15_hh_000334.html
将来的に月面等での建設活動に発展し得ることを視野に入れ、4年間で建設事業の基盤としての確立を目指す技術として次の技術開発を対象として公募が行われ、当社は対象技術Ⅰに応募し採択されました。
・ 対象技術Ⅰ:無人建設(自動化、遠隔化)に係る技術
・ 対象技術Ⅱ:月面で使用する建材の製造に係る技術
・ 対象技術Ⅲ:月面における簡易施設の建設に係る技術 - ※3
T-iDraw Map
https://www.taisei.co.jp/about_us/wn/2021/210611_8304.html
SLAM技術を活用し3D-LiDARを用いて当社が独自に開発した自己位置推定技術。 - ※4
ランドマークSLAM技術
予め設定・配置した、他と区別しやすい固定点(ランドマーク)を基準として自己位置推定と環境地図作成を行う技術。複雑性に欠けるエリア等でのSLAMによる自動運転を補完する。