国内初 GPS等の位置情報が届かない坑内で無人建設機械を自動運転
SLAM技術を活用した位置情報取得技術「T-iDraw Map」を開発・導入
2021年6月11日
大成建設株式会社
大成建設株式会社(社長:相川善郎)は、GPS等の位置情報が届かないトンネル坑内での無人建設機械の自動運転を国内で初めて実現しました。建設機械の周辺環境を示す地図作成と自己位置推定を3次元で同時に行うSLAM技術※1を活用した位置情報取得技術「T-iDraw Map」※2の開発・導入により、随時位置情報を取得でき、施工現場の周辺環境変化に的確に対応した自動運転が可能となります。また、この度、国土交通省国土技術政策総合研究所に設置された実大トンネル実験施設および国内の道路トンネル建設現場において、本技術を用いて建設機械の自動運転に関する実証を行い、その機能を確認しました。
生産労働人口の減少や高齢化が社会的問題となる中、労働力不足の解消や生産性向上は建設産業においても喫緊の課題となっています。そのため、国土交通省では『i-Construction』を推進しており、今後予想される人手不足への対応とともに、生産性向上への取り組みを加速させています。また、その中でも建設機械の自動化に関連する技術は、建設現場で早期に確立が望まれる技術※3の一つとなっています。
当社は、これまで自律方式や遠隔操作で作業を行う建設機械「T-iROBO®シリーズ」※4の開発に取り組んできましたが、これらの建設機械を用いた施工場所は、主にGPS等のGNSS※5を利用することができ、位置情報の取得可能な範囲となっていました。また、トンネル坑内など位置情報が取得できない工事では、光波測距儀の自動追尾機能などを採用した対応が必要となりますが、この方法では支障物や曲線部などで光波が遮られる場合や長距離での使用が困難になるなどの課題がありました。
そこで当社は、SLAM技術を活用して位置情報を取得できる「T-iDraw Map」を開発し、GNSSを利用できないトンネル坑内において土砂運搬する無人建設機械(クローラダンプ)の自動運転を実現しました。なお、SLAM技術を用いた無人建設機械の自動運転は、「T-iROBOシリーズ」の施工現場におけるDX戦略の一翼を担う技術となります。
本技術の特徴は以下のとおりです。(写真1・2、図1参照)
- 1
SLAM技術による位置情報を建設機械の自動運転に活用
本技術は、SLAM技術を活用し、無人建設機械に搭載したセンシング装置による計測情報から、建設機械の周辺環境を把握するための「環境地図作成」と「自己位置推定」を同時に行います。これらのデータを基に建設機械の位置情報などを取得し、あらかじめ設定したルートを自動走行できるため、GNSSを利用できない坑内や地下でも自動運転が可能となります。 - 2
障害物を回避するルートの自動作成による減速走行可能
無人建設機械の自動運転時において、走行ルート上に想定していない障害物が出現した場合でも、センシング装置で障害物を認識し、自動で回避ルートを作成して、減速走行します。時々刻々と環境が変化する施工現場の状況に的確に対応でき、安全性の高い自動運転が可能となります。
今後、当社は、「T-iDraw Map」を活用した無人建設機械の自動運転を現在施工中のトンネル現場に順次導入するとともに、実用性の高いタイヤ式建設機械への適用を進め、将来的には屋内、地下での自動運転や災害発生時における探査・点検への適用拡大を目指してまいります。また、「T-iROBOシリーズ」にも本技術を積極的に展開し、無人・有人の建設機械が協調して動作する「T-iCraft®」※6との連携を図りながら、更なる生産性・安全性の向上を推進します。

写真1 SLAM技術を利用したトンネル坑内での自動運転状況
(国土技術政策総合研究所の実大トンネル実験施設にて実施)
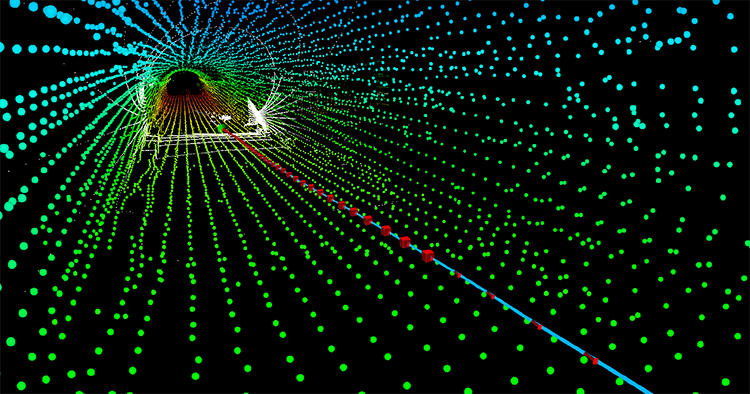
図1 センシング装置で取得したデータを基に作成した環境地図と建機自己位置推定状況
(トンネル内地図情報(緑点・青点)、建設機械位置・走行予定ルート(赤点・青線)を表示)

- ※YouTubeにリンクしています。
- ※1
SLAM技術:
Simultaneous Localization And Mappingの略称。 自己位置推定と環境地図作成を同時に行い、移動体が「センシングによって得た計測値」と「移動することで得た計測値」を照らし合わせ、その誤差を収束計算することで、作成した地図上に自己位置を推定する技術。クローラダンプに搭載したSLAM技術および自動走行システムは、家電総合メーカーパナソニック株式会社の関連会社である、パナソニック アドバンストテクノロジー株式会社の不整地走行向けロボティクスを活用している。 - ※2
T-iDraw Map:
GNSSによる位置情報が届かない場合に特に有効なSLAM技術を活用した無人建設機械の自動運転システム。自己位置推定と環境地図作成を同時に行い、GNSSによる位置情報の代替を可能にした。 - ※3
建設現場で早期に確立が望まれる技術:
国土交通省では、2020年12月に「国土強靭化に関する施策のデジタル化」の中で、無人化施工技術の安全性・生産性を向上させ、2025年度までに建設機械の自律制御・走行技術の確立を目指す。「国土強靭化に関する施策のデジタル化」では、2020年12月11日に国土交通省から発表された「防災・減災、国土強靱化のための5か年加速化対策」の中で、「国土強靭化に関する施策を効率的に進めるためのデジタル化等の推進」-「国土強靭化に関する施策のデジタル化」-「無人化施工技術の安全性・生産性向上対策」において、5G・AI 等を用いた自律制御・走行技術を搭載した建設機械として、バックホウ、クローラダンプ、ブルドーザ、振動ローラの4機種を挙げ、2025年度までの実現を掲げている。 - ※4
T-iROBO®シリーズ:
人とロボットの協働を目的として、大成建設が開発した建設作業用ロボットシリーズを示している。 - ※5
GNSS:
Global Navigation Satellite Systemの略称。 人工衛星を使用して地上の位置を計測する「衛星測位システム」のうち、全地球を測位対象とすることができるシステム。アメリカが運用するGPS(Global Positioning System)を含む総称。 - ※6
協調制御システム「T-iCraft®」:
建設機械メーカーによらず、自動運転・有人運転に対応でき、条件が整えば複数機種の建設機械を協調制御可能なシステム。T-iCraft は、Taisei ict Construction Robot Automatic Fit Teamの略称。