自動運転をインフラから支える位置補正技術「T-Localizer」を開発
2025年12月15日
大成建設株式会社
大成建設株式会社(社長:相川善郎)は、自動運転レベル4※1の社会実装の拡大を見据え、トンネル内など特徴の少ない区間で生じやすい走行方向の車両位置の誤差を、インフラ側から効果的に補正する位置推定技術「T-Localizer」を開発しました。本技術により、トンネルなどGPS信号が届きにくい環境でも、安全かつ正確な自動運転走行が可能になります。
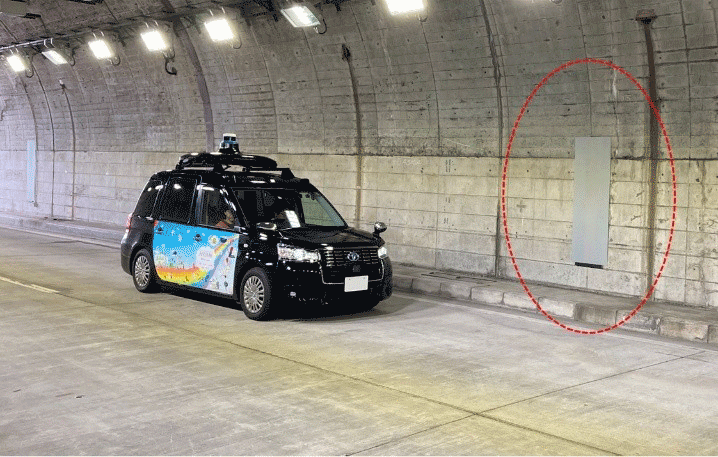
本技術は、特徴量が少ないトンネル内で自動走行する車両の位置を補正するため、一定区間毎に特殊な塗料を塗布した「反射体」をトンネル壁面などに配置することで、車載LiDARが「反射体」を自動検出し、車両位置の誤差を正しい位置へ補正しながら、自動運転による安定走行を実現する技術です。自動運転車側の改造を必要とせず、インフラ側に付属物を容易に設置することで、高精度な走行を支援できる点が特長です。今後、自動運転レベル4の社会実装を支える新しい道路インフラ技術として、適用拡大が期待されます。
米国や中国では無人タクシー運行が一部で始まるなど、自動運転技術はすでにレベル4(高度運転自動化)の段階へ進みつつあります。日本でも、2023年4月に施行された改正道路交通法により、自動運転車両の公道走行が可能となり、政府のロードマップでは「2025年度を目途に50カ所程度、2027年度までに100カ所以上での自動運転レベル4のサービス展開」を目標に掲げ、全国各地で実証実験が行われています。
当社は2021年から自動運転システムの開発や無人物流・サービスビジネスを手掛ける株式会社ティアフォー(代表取締役 執行役員CEO:加藤真平)と連携し、自動運転サービスの実現に向けた東京・西新宿エリアでのプロジェクトに参画しています。総合建設会社として、これまでも道路をはじめとしたインフラ整備により道路側から自動運転車両の安全で円滑な走行を実現する位置推定技術の開発・実証に積極的に取り組んできました。
自動運転では、変化する周囲の状況をリアルタイムに認識しながら、移動中の車両位置を高精度に把握することが不可欠です。自動運転レベル4の走行手法としては、主にレーザー光による測距技術のLiDARと高精度3D地図を用いる方式などが採用されています。これらの方式は、自動運転に特化したインフラ設備を事前に用意する必要がないなどの利点があります。一方、周辺環境が単調・広大で変化に乏しい長大トンネルや森林区間では、これらの方式では車両位置の誤差が蓄積し、自動運転による走行が困難になり自動運転停止に至るといった課題が残されていました。
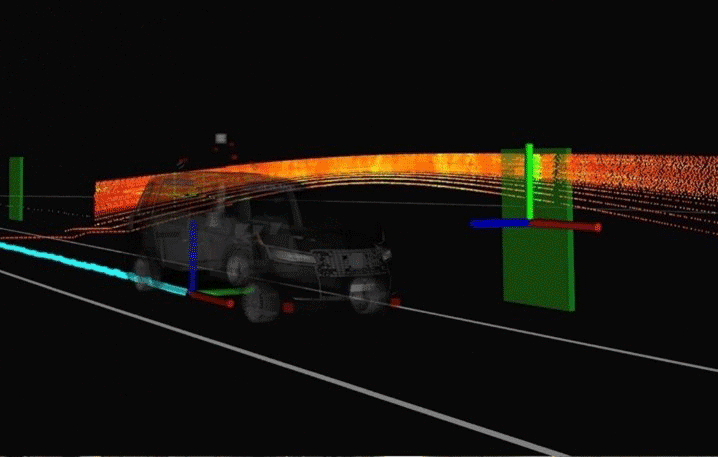
そこで当社は、株式会社ティアフォーとの共同研究により、自動運転車両に搭載されているLiDARが検出可能な特殊塗料を塗布した反射体をトンネル壁面などに一定間隔で設置することで、車両位置の誤差を補正し、安全な無人自動運転を実現する位置推定技術「T-Localizer」を開発しました。(写真1、図1参照)
「T-Localizer」の特長と実証実績は以下のとおりです。
【特長】
- 1
新たなセンサの付加など車両側の改良が不要
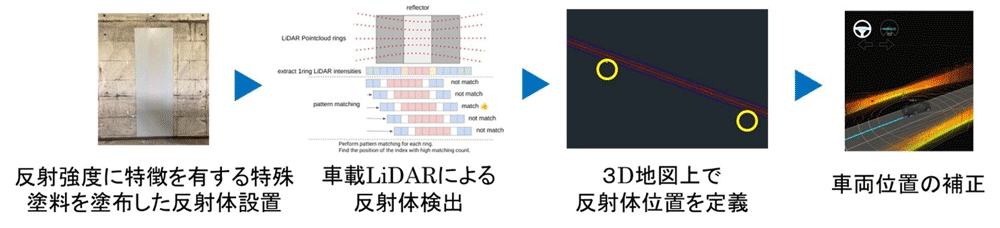
本技術は自動運転車両が搭載しているLiDARを用いて、トンネル壁面などに設置された反射体を検出し、3D地図上に定義された当該反射体の位置情報と推定した車両位置を照合することで位置誤差を補正します。(図2参照)このため、新たなセンサの付加など車両側の改良が不要で、車種を問わず容易に適用することができます。 - 2
必要区間への反射体設置で安定走行を実現
自動運転車両の位置に誤差が生じやすいトンネルなどにのみ、壁面などに一定間隔(例:80m)で反射体を配置することで、車載LiDARが反射体を検出して正確な位置情報に補正し安定走行が可能となります。そのため、特殊塗料塗布量も最小限のインフラ改良で導入できます。 - 3
容易施工で、低コスト・メンテナンス性・耐久性に優れる
反射体は特殊塗料を用いて壁面に直接塗布するため、低コストかつ施工が容易で、既存構造物にも対応可能です。摩耗の影響を受けにくく、約10年間塗り替え不要で、メンテナンス性にも優れています。特殊塗料・施工については、当社グループの大成ロテック株式会社と連携して実施しています。
【実証実績】
- 2024年度(国土交通省道路局「走行空間実証実験」):新潟県佐渡市・南片辺トンネル(全長1.9km)等の4トンネルでの自動走行
- 2025年度(関西電力株式会社自動運転実証):扇沢駅(長野県大町市)~黒部ダム駅(富山県立山町)間の関電トンネル(トンネル全長5.4km)で、国内最長クラスのトンネル区間での自動走行
今後当社は、「T-Localizer」を積極的に提案し、公共交通の人手不足解消や安全・安心な運行を促進することで自動運転レベル4の社会実装をインフラ側から支援してまいります。また、地方自治体や地域の交通事業者などと連携を深めながら、様々なプロジェクトへの参画を通じて多様な環境へ適用を拡大し、将来の自動運転社会を支えるインフラと次世代のまちづくりに貢献してまいります。
- ※1
自動運転レベル4:
米国自動車技術者協会(SAE)が定義づけた自動運転の基準。レベル0(手動運転)からレベル5(完全自動運転)までの6段階に分類。レベル4は限定条件(区間・気象等)下でシステムが運転を担い、無人運行を可能とするレベル。国内ではレベル4の特定自動運行が8箇所で認可(2025年9月現在)。走行手法には車両完結型と路車協調型などがあるが、走行する環境や目的・用途、コストなどを総合的に判断して走行手法の選定が必要となる。路車協調型は、磁気センサを用いた電磁誘導方式やGPSで車両位置を把握する方式、レーザー光による測距技術であるLiDARと高精度3D地図を活用する方式などがある。
自動運転を“インフラ側”から支える―新技術「T-Localizer」開発