超低床型自律走行搬送ロボット「MogLifter」を開発
2025年2月14日
大成建設株式会社
大成建設株式会社(社長:相川善郎)は、「生産プロセスのDX」の一環として、ラピュタロボティクス株式会社(CEO:モーハナラージャー・ガジャン)、株式会社匠(社長:阿知波孝典)と共同で、潜り込み式超低床型自律走行ロボット「MogLifter」を開発しました。本機を当社が建設現場での実証運用を進めている自律走行搬送ロボットシステム「T-DriveX」※1シリーズのラインアップに加え、現場内での資機材移動の更なる効率化を図ります。
当社は、建設現場での資機材搬送作業の効率化を図るため、パレット型とフォークリフト型の2機種の自律走行搬送ロボットを「T-DriveX」シリーズとして2023年に開発し、建設現場で実証運用を進めてきました。過去に開発したパレットタイプやフォークリフトタイプでは長尺の資機材を搬送する場合は、幅の広い経路の確保が必要となり、荷下ろし時などは何度も切り返しが必要になるなど、経路の設定が制約され、広い稼働範囲を確保する必要がありました。
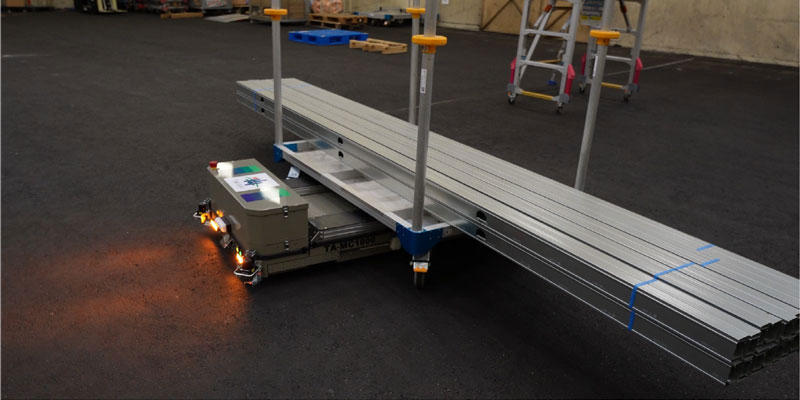
そこで当社は、これらの課題を踏まえ、長尺の資機材の搬送にも柔軟に対応可能な超低床式自律走行ロボット「MogLifter」を開発しました。本機は、建設現場で使用される長尺フレームなどの資機材が積まれた台車の下に潜り込んで自動搬送を行うことができ、建設現場を想定した環境での実証実験により、その実用性を確認しました。
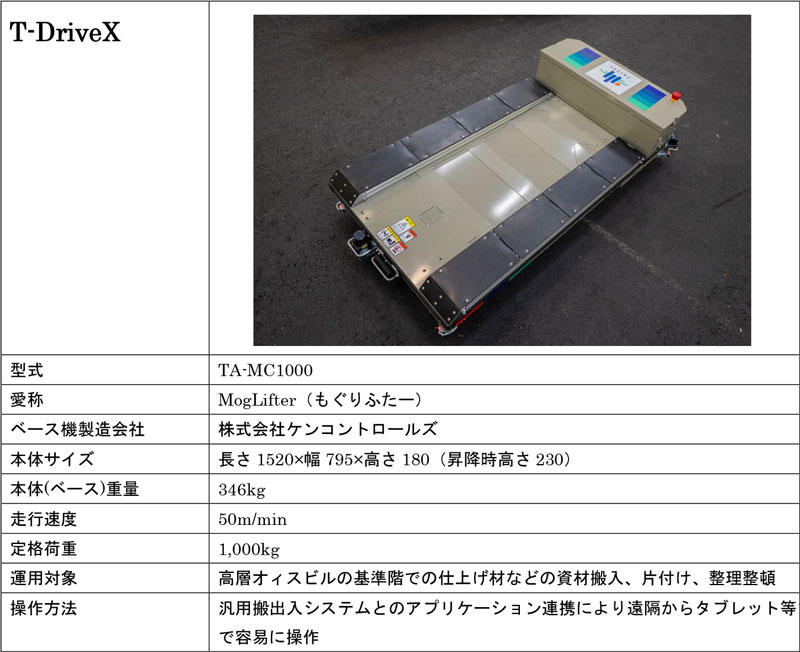
「MogLifter」の特長は以下のとおりです。(写真1、2、表1参照)
- 1現場内の経路状況に応じて移動方向を選択し走行可能
本機は走行部に360度全方位に進行可能な球体駆動方式を採用しています。これにより、長尺の資機材を運搬する際に短辺方向側に移動できるなど、現場内の経路状況に応じて移動方向や走行形態を自由に選択して効率よく搬送することが可能です。
- 2用途に応じてバッテリー積載量を調節可能
本機は用途に応じてバッテリー積載量の増減を調節することができます。積み込み・荷下ろしなどの際に台車の下をくぐり抜ける必要がある場合にはバッテリー積載量を最小とする一方、くぐり抜ける必要がない場合には稼働時間の延長を優先しバッテリー積載量を最大にして搬送作業を行うことができます。
- 3自律走行時の安全装備を搭載
本機には自律走行時の安全対策として、障害物を避けるLiDARセンサーの他、物理的に接触した場合に停止するテープスイッチを装備しています。
- 4「T-DriveX」シリーズの他機種との連携・使い分けが可能
本機はフォークリフト型ロボット(Rapyu.)などとの連携により、資機材の受け渡しを容易に行うことができます。このため、現場状況や作業内容、用途に応じて「T-DriveX」シリーズの各機種の特性を活かした資機材搬送や台車の移動が可能となります。
今後当社は、「T-DriveX」シリーズの3機種の自律走行搬送ロボットを継続的に実証運用し、連携させて効果的に使い分けることで、建設現場における資機材移動の更なる効率化と現場作業の省力化を進め、生産性向上に努めてまいります。

- ※1
T-DriveXシリーズ:(https://www.taisei.co.jp/about_us/wn/2023/230821_9622.html)

- ※DX認定とは「情報処理の促進に関する法律」に基づき、「デジタルガバナンス・コード」の基本的事項に対応する企業を国が認定する制度です。