遠隔操縦式水中作業機「T-iROBO® UW」の硬岩掘削用アタッチメントを開発
2023年1月26日
大成建設株式会社
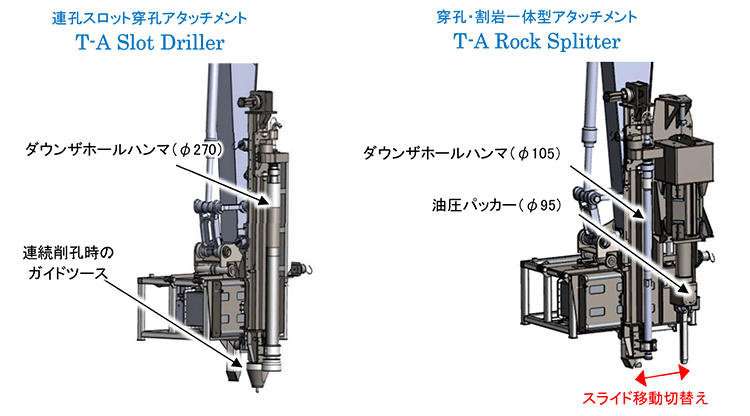
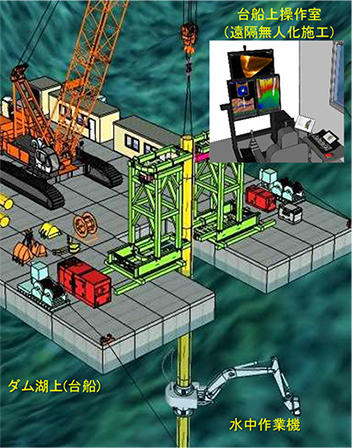
大成建設株式会社(社長:相川善郎)は、2014年に株式会社アクティオ(社長:小沼直人)、極東建設株式会社(社長:松原成忠)と共同開発し、ダムのリニューアル工事に適用実績のある遠隔操縦式水中作業機「T-iROBO UW※1」に装着する硬岩掘削用アタッチメントを新たに共同開発しました。今回開発した、連孔スロット穿孔アタッチメント「T-A Slot Driller(ティー・エー・スロットドリラー)」と穿孔・割岩一体型アタッチメント「T-A Rock Splitter(ティー・エー・ロックスプリッター)」の2機種(図1参照)は、水中での硬岩掘削が可能な機種となっています。また、既存の機種と併用することで、軟質な堆積土から硬質な岩盤まで様々な地盤条件での水中掘削が可能となります。(図2参照)
これまでのダム湖内の硬岩掘削では、水上に仮設桟橋を構築し、桟橋上から全周回転掘削機によって岩盤にケーシングを回転圧入したのち、破砕装置を用いて岩石を破砕して掘削する手順によって施工してきました。このため、仮設桟橋構築等に伴う工程の長期化、コスト増大など多くの課題がありました。
そこで当社は、従来の油圧ブレーカー等の破砕装置では対応が困難であった硬岩掘削にも適用できるよう、「T-iROBO UW」に装着可能な新型アタッチメント2機種の開発を行い、併せて作業機先端部の位置精度や微小な位置合わせなどの遠隔操作に関わる機能を拡張しました。

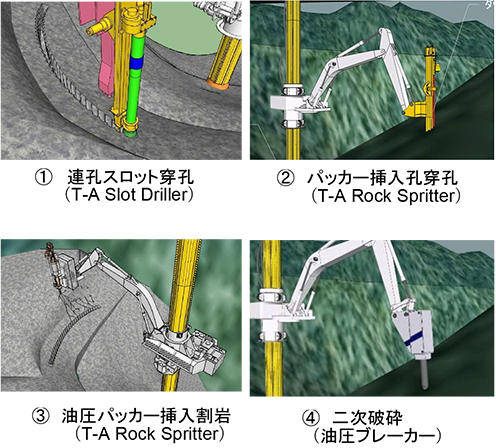
水中での硬岩掘削では、作業状況に応じてT-iROBO UWに装着する各種アタッチメントを交換しながら、以下の手順で作業を行います。(図2、3参照)
- ①岩盤の掘削境界に連続して穿孔(連孔スロット穿孔アタッチメント使用)
- ②掘削する岩盤に油圧パッカー挿入孔を穿孔
- ③
油圧パッカーを挿入後、くさびを圧入させて岩盤を押し拡げ亀裂を発生させて割岩
(②、③は、穿孔・割岩一体型アタッチメント使用) - ④亀裂が生じた岩盤を油圧ブレーカーで二次破砕
今回開発した新型アタッチメントおよび拡張した機能の特徴は、以下のとおりです。
- 1
連孔スロット穿孔アタッチメント(T-A Slot Driller)を用いて効率よく連続穿孔
本アタッチメントは、ダウンザホールハンマ(φ270)に並行して設置されたガイド治具(ガイドツース)を既設孔に挿入し、隣接孔との孔間隔を一定に保持した状態で、効率よく連続してスロット孔を形成できます。(図1、写真1参照)
写真1 連孔スロット穿孔状況(模擬試験体) - 2
穿孔・割岩一体型アタッチメント(T-A Rock Splitter)を用いて効率的に岩盤破砕
本アタッチメントは、岩盤穿孔用ダウンザホールハンマ(φ105)と割岩用油圧パッカー(φ95)を備えた一体型装置です。水中作業機のブームを動かさずにスライド式で岩盤穿孔用から割岩用治具に切替えることができ、穿孔位置に対して±5mm以下の精度で割岩用油圧パッカーを正確に挿入し、効率的に岩盤破砕を行えます。(図1、写真2参照)
写真1 連孔スロット穿孔状況(模擬試験体) - 3
マシンガイダンス機構を改良し、アタッチメント先端の位置精度を向上
アタッチメント先端の位置座標は、水中作業機を保持するシャフトを基点とし、ブーム、アーム、アタッチメントの姿勢から演算し算出されます。今回の位置制御では、従来の角度計に替わり、角度や位置などを高精度に計測するロータリーエンコーダを各部に設置し、リアルタイムでの計測が可能となっており、マシンガイダンス機構の改良により、作業機の操作性や先端部の位置精度( ±5cm以内)が格段に向上しています。 - 4
微操作モードを増設し、遠隔操作による微小な位置合わせが可能
従来の作業機では、水中でのアームに作用する負荷により動作速度が変化するため、微小な位置合わせが困難でした。このため、油圧システムを改良し、初動速度を通常の1/10の低速かつ一定で操作可能な微操作モードを増設しました。これにより、遠隔操作による微小な位置合わせを可能としました。
今後、当社は、ダムのリニューアルをはじめとする各種水中掘削工事において、本作業機を提案、活用することにより、様々な地盤条件での水中作業の施工精度や作業効率の向上を図り、工期短縮、コスト縮減および作業の安全性確保を推進してまいります。
- ※1
T-iROBO UW:水上の台船からダム湖底地盤にシャフトを降ろし、これに沿って昇降する作業機先端に様々なアタッチメントを装着し、遠隔操作による水中掘削作業を実施可能な機械。