建物内の磁場分布を利用した屋内位置測位システムを開発
位置情報を可視化し、建物利用者の利便性や安全性を向上
2022年4月7日
大成建設株式会社
大成建設株式会社(社長:相川善郎)は、スマートデバイスの内蔵センサと建物固有の磁場分布を活用することで、無線通信機器を設置することなく、屋内での所在位置を高い精度で特定できる位置測位システム※1を開発しました。本システムは、空港、商業施設の誘導案内や医療施設での患者の見守りなど人の位置情報を可視化し、建物利用者の利便性や安全性を向上させることが可能となります。
屋外での人の所在位置は、スマートフォンやタブレット端末等のスマートデバイスに内蔵されたGPS機能によって特定することが可能です。しかし、空港、商業施設、医療施設などの屋内施設では、GPS電波が届きにくいため、所在位置が実際よりも大きくずれて表示される場合があります。そのため、従来ではBeacon等の無線通信機器を建物内の各所に設置し、これらの機器から発信される電波の受信位置を把握することで、所在位置を特定してきました。しかし、この方法では、建物内に多数の無線通信機器を設置する必要があり、機器設置に係る導入コストや電池交換等の維持管理コストの増加という課題がありました。
そこで当社は、建物の鉄骨や溶接等により生じる建物固有の磁場分布を事前に測定してマップを生成し、運用時にスマートデバイスの内蔵センサ(9軸センサ※2)を用いて位置測位する技術を開発しました。また、実証実験を行った結果、屋内での人の所在位置の特定に適用可能であることを確認しました。
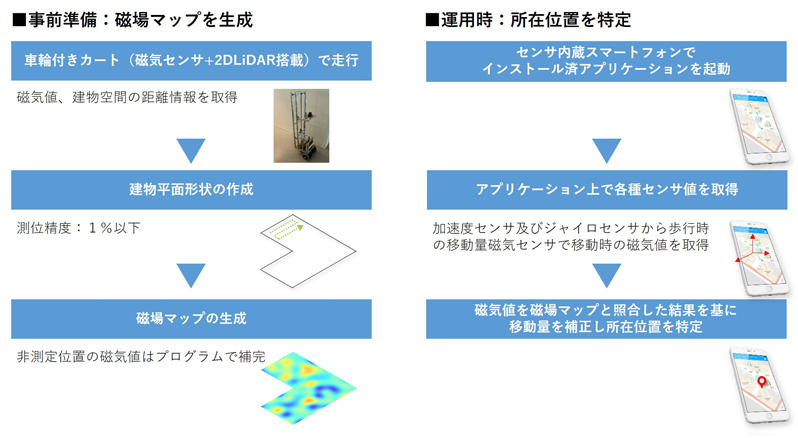
本技術の利用手順は以下の通りです。
本技術の特徴は以下のとおりです。
- 1
LiDAR※4と磁気センサを用いて正確に空間内の磁気値を測定し、磁場マップを生成
建物形状を正確に計測する(計測誤差1%以下)2次元LiDARと磁気センサを用いて空間内の磁気値測定を行い、正確な空間内の磁場分布図を生成します。 - 2
建物固有の磁場分布を活用し、屋内での所在位置を高い精度で特定
本システムは建物固有の磁場分布を活用し、屋内での所在位置を高い精度で特定することができます。鉄筋コンクリート造建物の廊下空間において、位置測位精度を検証した結果、スマートデバイスの内蔵センサ値と磁場分布を用いることで、位置測位の誤差を1~3mまで向上させることができました。一方、Beacon等の無線通信機器を用いた場合の位置測位の誤差は3~5mであることから、屋内における本システムの高い精度の位置測位が証明されました。 - 3
什器などのレイアウト変更では磁場分布の再測定不要
本システムの運用に際して、空間の磁気は鉄骨や溶接などに残留する磁気量に依存しており、什器などを移動する事ではほとんど変化しないため、レイアウト変更に伴う建物内での磁気値の再測定※5は不要となります。 - 4
屋内位置測位に必要な導入費用を大幅に削減可能
本システムでは、事前に測定・生成した建物内の磁場マップを活用するため、無線通信機器を用いた位置測位システムに比べ、導入費用を1/4程度に削減できます。
今後、当社は、本システムを建築現場において施工フェーズで構築した「T-BasisX」※6や竣工後の維持管理フェーズにおける「LifeCycleOS」※7と連携させ、顧客ニーズに応じたソリューションとして建物利用者の利便性と安全性の向上や施設管理業務支援の一助として、積極的に提案してまいります。

- ※1
屋内位置測位システム:本システムは、宇都宮大学工学部 ロボティクス・工農技術研究所所長 尾崎功一教授、名古屋大学大学院工学研究科 赤井直紀助教のご協力のもと、ロボットを対象とした自己位置推定技術を、人の位置測位に拡張させたシステム。
- ※2
9軸センサ:加速度センサ(XYZ)、ジャイロセンサ(XYZ)、磁気センサ(XYZ)の合計9軸の総称。別名、モーションセンサとも呼ばれ、スマートフォンの傾きの検出やマップアプリケーションで方位を特定するために、スマートデバイスに内蔵されているセンサ。
- ※3
歩行時の移動量:歩行者慣性航法(PDR:Pedestrian Dead Reckoning)と呼ばれる手法。スマートフォン等に内蔵される加速度センサ、ジャイロセンサ等によって歩行状態や速度から移動量算出する方法。スマートフォンで運動量を計測するフィットネスアプリ等で実装されていることが多い
- ※4
LiDAR:Light Detection and RangingまたはLaser Imaging Detection and Rangingの略で、測域センサと呼ばれる。周辺環境との距離を測定することができ、自動運転車両や自律移動式ロボットでは標準装備として搭載されている。
- ※5
磁気値の再測定:落雷が発生した際に、建物に設置した避雷針の位置や接地経路により建物固有磁場が変動する可能性があるため、数年に1回程度建物内の磁気値を再測定したほうがよい場合もある。
- ※6
T-BasisX :建築現場における各種ロボットやAI・IoTソリューション活用のための、メッシュWi-Fi 及び位置把握ソリューションを一体化し、IoT活用見える化システムと連携した標準基盤。
https://www.taisei.co.jp/about_us/wn/2021/210420_8100.html - ※7
LifeCycleOS:BIMデータと建物の運用開始後に刻々と変化していく建物管理・運用に関する各種データ等を紐づけ、統合管理することができるシステム。