生産施設向け力触覚伝達型遠隔操作システム(新型プロトタイプ)を開発
「力加減」を正確に伝達し、省力化を実現
2018年7月3日
大成建設株式会社
大成建設株式会社(社長:村田誉之)は、この度、力触覚伝達技術を利用した遠隔操作システムの新しいプロトタイプを開発しました。
当社では、昨年度より、5本指のロボットアーム(遠隔側)と力触覚グローブ(操作側)を組み合せ遠隔操作する初期プロトタイプの開発を開始しました。このシステムでは、物体を掴む際の微妙な力加減の情報を双方向に伝達でき、作業員による手作業をいつでもどこからでも遠隔操作することが可能で、将来的には作業手順や力加減などを学習・再生し、最適な作業パターンの実現を目指しています。しかし、開発過程において、システム構成が複雑で、かつ操作者によるロボットハンドなどの動作制御が難しく、また一般ユーザの操作習熟には時間や経験を要するという課題が生じました。
そこで当社は、力触覚伝達技術の普及展開を進める上で障壁となりうる上記課題を解決すべく、昨年度開発した初期プロトタイプを改良して、システム構成、形状および操作性の単純化などについての検討を進めてきました。
今回、開発した2本指の新型プロトタイプは、実際の生産現場にも導入しやすい汎用品を多用したシンプルなシステム構成となっており、誰でも容易に遠隔からロボットを直接操作し、作業手順や力加減などの動きを記憶させることができるよう工夫されています。
本システムは、食品や医薬品製造工場など生産施設における導入を想定し、下記のような特徴を備えています。
本システムの特徴
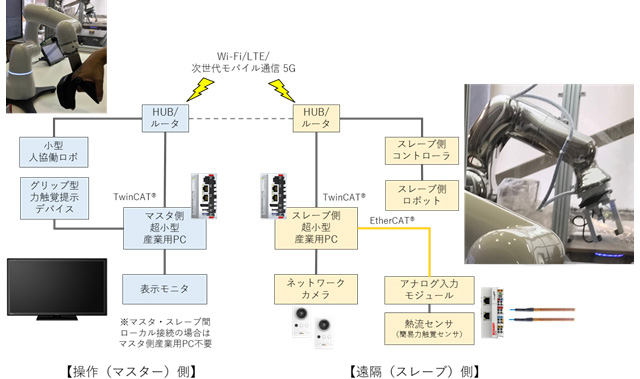
システム全体
- 生産現場の幅広い用途に適用できるシンプルなシステム構成。
- システムのコントロールには、統合制御ソフトウェアであるTwinCAT®を組み合わせた超小型産業用PCを採用(1)し、省スペース化を実現。
- 操作データ(作業手順、作業時実映像、力加減等)の保存・蓄積により、将来のAIを採用した作業への対応が可能。
操作側
- 小型の「人協働ロボット(2)」を操作側(マスター側)に採用し、直感的かつ安全な操作感を実現。
- ロボットアーム先端に操作者が指や手に容易に装着できるグリップ型力触覚提示デバイス(3)を採用。
遠隔側
- 遠隔側(スレーブ側)に繊細な動きにも追従可能な垂直多関節ロボット(4)を採用。
- 生産現場での遠隔操作制御用通信に相当するネットワークにオープンな国際規格(IEC61158)となっているEtherCAT®(5)を採用し、生産現場での力加減などをリアルタイムに把握し、遅延なく、正確な操作が可能。
本システムの生産施設(食品、医薬品製造工場)への適用において、以下のような効果が期待できます。
- 本システムの導入により、製造エリアでの省力化を実現し、近い将来IoT、AIをコアとしたスマート化と併せ、生産施設での生産性向上を図るとともに、無人化やロボット本体の省エネ化による空調・照明等の運用コストを削減。
- 本システムの利用により場所・時間などを問わずに24時間連続で作業が可能となるため、海外からでも日本との時差を生かして現地労働力が活用できるなど新しいワークスタイルを創出。
今後、当社は協力企業と共に、力触覚伝達遠隔操作技術の普及展開により、生産施設における生産性向上の実現に向けた取り組みを継続して参ります。
注釈
- 1ベッコフオートメーション株式会社 超小型産業用PC「C6015」、統合制御ソフトウェア「TwinCAT®」
- 2株式会社デンソーウェーブ 小型6軸協働ロボット COBOTTA®
- 3イクシー株式会社 「EXOS Gripper」
- 4株式会社デンソーウェーブ VSシリーズ
- 5ベッコフオートメーション株式会社 統合制御ソフトウェア「EtherCAT®」
- ※YouTubeにリンクしています。