力触覚伝達技術を利用した
遠隔操作システムの開発に着手
遠隔操作で現場に「力加減」を正確に伝達
2017年7月20日
大成建設株式会社
イクシー株式会社
大成建設株式会社(社長:村田誉之)は、この度、イクシー株式会社(社長:山浦博志)と共同で、力触覚伝達技術を利用した遠隔操作システムの開発に着手しました。
従来、遠隔から双方向に伝達可能であった「視覚」、「聴覚」情報に加え、力触覚伝達技術は、IoT技術を利用して物体の硬さ・軟らかさなどの「触覚」や物体を扱う際の「力加減」の情報を双方向に伝達可能とする技術です。
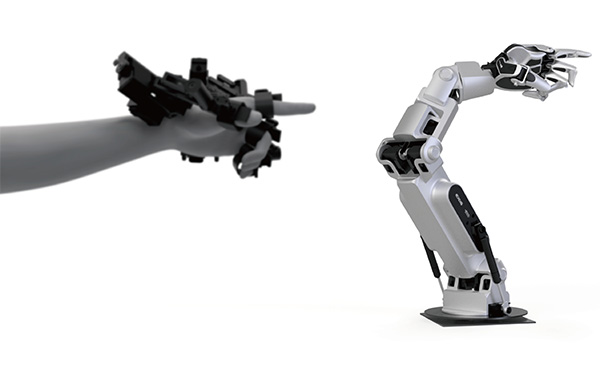
本システムの開発では、まず労働集約型作業の省力化を目標に、2017年6月よりイクシー株式会社で開発した5指ハンドを備えたロボットアームと力触覚グローブ『EXOS』を組み合わせたシステム構築を開始しており、2017年度中にプロトタイプの完成、2018年度にシステムの実用化を目指します。
現在、生産施設では様々な自動化ロボットや装置が導入され、多くの生産工程において高効率化が図られています。しかし、一方で、人の手に頼らざるを得ない労働集約型作業も未だに残っており、生産性向上・コスト削減・熟練作業員不足の解消などの面で多くの課題が山積しているのも事実です。
こうした課題の解決には、特定用途毎に自動化ロボットや装置を開発して対応する方法もありますが、作業員による手作業、特に「力加減」の再現は現在のロボットでは対応が困難で、再現するための技術開発には相当のコストと期間が必要となります。
そこで当社とイクシー株式会社は、開発コストや期間を極力抑えられるよう、これまでバーチャルリアリティや医療分野などへの適用が検討されていた力触覚伝達技術を利用し、インターネットを介して遠隔地でも対象物の硬さ、軟らかさを感じながら操作し、そのデータを蓄積・学習して、ロボットなどが自ら作業することができるIoT技術の開発を開始しました。
本システムで構築を目指す主な開発項目と期待される効果は以下の通りです。
開発項目
- 遠隔操作による物体把持などの「力加減」を現場にフィードバックする技術
- HMD等のディスプレイを介して実映像を確認しながら、正確に遠隔操作を行う技術
- 操作データ(作業手順、作業時実映像、力加減など)の保存・蓄積
- 操作データの分析・編集・再生による作業パターンの最適化
- 人工知能を活用した学習済みモデルの構築
- 次世代高速通信規格(5G)への対応
効果
- インターネットを介した遠隔操作により、時間・場所を問わず作業が可能となり、労働集約型作業に対して多様なパターンでの適用が期待される。
- 作業員が立ち入れない環境下において「力加減」を伴う遠隔操作が可能となる。
- 操作データの蓄積・学習済みモデルに基づきロボットの自己判断による作業が可能となる。
- 熟練作業員の動作を記録・編集することで、効率的な技術の蓄積が期待される。
- 上記の効果により、生産性が向上し、コスト削減が期待される。
当社とイクシー株式会社では、今後、力触覚伝達技術を多目的な用途に展開可能なIoTの重要技術と捉え、まず生産施設向けに本システムの実用化を図り、食品製造工場、医薬品製造工場などへの提案を進めるとともに、医療・福祉施設、物流施設、集客施設など多目的用途への適用や建築・土木現場等の広範な作業への応用も検討して参ります。
- ※YouTubeにリンクしています。