シールドマシンのカッタービット交換ロボットを開発
マシン内部から遠隔操作により短時間で安全にビット交換を実現
2022年3月24日
大成建設株式会社
地中空間開発株式会社
大成建設株式会社(社長:相川善郎)と地中空間開発株式会社(社長:平山真治)は共同で、シールドマシンの機械式ビット交換工法「THESEUS工法®」※1に改良を加え、マシン内部の可動式マンホールを介して遠隔操作により迅速かつ安全にカッタービットを交換できるロボットを開発しました。本技術の適用により、従来の「THESEUS工法」よりもビット交換時間を4割短縮し、また、人力での交換作業が無くなることから、安全性が格段に向上します。
2021年に開発した「THESEUS工法」は、シールドマシンの口径に関わらず、カッターヘッドに装着された先行ビットをマシン内部から何度でも交換できる工法です。しかし、可動式マンホールの取付位置やマシン口径の大きさ、ビット配置などによっては、交換者が無理な体勢での作業を強いられ、手が届きにくい位置にあるビット交換に労力と時間を要していました。また、大口径マシンでは重く持ち運び困難な大型ビットを扱うため、交換時の作業効率低下や手指の挟まれ等の安全性にも課題がありました。
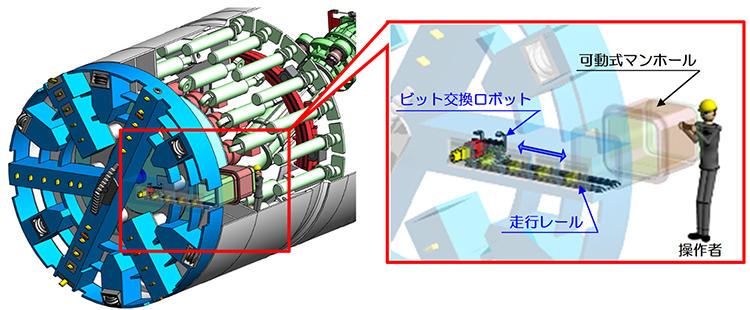
そこで、両社はカッタースポーク内に予め設置されたレール上を自走するロボットを開発し、遠隔操作によりビットを効率よく安全に交換できるよう改良を加え、この度、実大モデルを用いた実証実験を行い、ビット交換手順とその効果を確認しました。(図1参照)
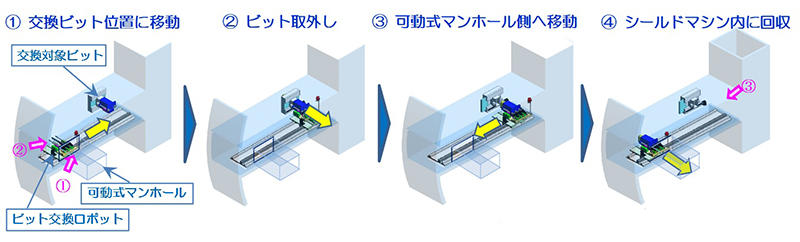
ビット交換の手順と本技術の特徴は以下の通りです。(図2、写真1参照)
【交換手順】
- ①ビット交換ロボットが交換対象となる旧ビット位置まで移動(遠隔操作)
- ②旧ビットをスポーク内部に引き込んで取り外し、ロボット本体内に回収(遠隔操作)
- ③旧ビット回収後、ロボットが可動式マンホール位置まで移動(遠隔操作)
- ④可動式マンホールまで移動したロボットから旧ビットをシールドマシン内部に回収(手動)
なお、新ビットの取付けは、上記と逆の手順で実施
【特徴】
- 1
ビット交換ロボットを可動式マンホールからスポーク内に設置し、容易に交換可能
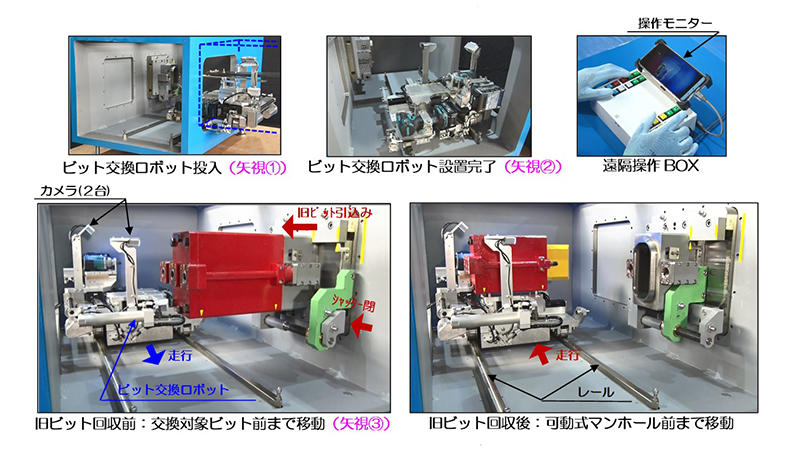
ビット交換ロボットはコンパクトな形状(B30×W30×H30cm)のため、交換作業時に可動式マンホールを介してスポーク内に設置でき、スポーク内に予め敷設された走行用レール上を自走して、容易にビット交換を行うことが可能です。 - 2
シールドマシン内部から遠隔操作が可能
ロボットに搭載された2台のカメラでスポーク内の作動状況を確認しながら、可動式マンホールを介してシールドマシン内部から有線での遠隔操作を行うことができます。 - 3
ロボット単独でビット交換でき、作業効率および安全性が向上
狭隘なスポーク内でロボットを用いたビット交換作業を遠隔操作により行えるため、作業効率と安全性が大幅に向上します。また、従来の「THESEUS工法」と比べ交換時間を4割削減し、10分程度の時間でビット交換が行えます。
今後、両社は、本ロボットのセンシング機能などを充実させることでビット交換作業の全自動化を図り、更なる生産性および安全性の向上に努めてまいります。
- ※1
THESEUS工法:
シールドマシンの口径に関係なく、マシン内部から可能式マンホールとスライド式交換装置を用いて、人力によるビット交換を可能とする機械式ビット交換工法。ビット交換用の立坑を新たに構築する必要がなくなるため、周辺環境への影響を軽減した施工を実現でき、また、何度でも効率よく安全にビット交換が可能。