力触覚伝達型遠隔操作システムとAIを連携
ロボットアームの自律動作を実現
2019年2月20日
大成建設株式会社
株式会社エクサウィザーズ
大成建設株式会社(社長:村田 誉之)と株式会社エクサウィザーズ(社長:石山 洸)は共同で、大成建設が開発した力触覚伝達型遠隔操作システム(以下、遠隔操作システム)とエクサウィザーズが開発したマルチモーダルAI※1(以下「AI」)を組み合わせ、ロボットアームの動作検証実験を実施しました。その結果、遠隔操作システムと「AI」の連携により、ロボットアームの自律動作が可能であることを確認しました。
近年、人手不足や長時間労働などの社会的な課題を背景に、生産施設などにおいて自動化や省人化を推進するための産業用ロボットの需要が拡大しています。しかし、ロボットを自律動作させるためには、作業内容を記録・学習する「ティーチング作業」に時間と費用がかかるため、取り扱い品目が多様で労働集約型の作業が多い食品工場や、品質管理工程などで少量多品種を取り扱うような医薬品製造施設では、ロボット導入の潜在的ニーズが大きいものの、普及が進みづらい状況にありました。特に、粘性が異なることや、注ぎ終わりから計量までの状態変化を予測する必要がある液体秤量は困難とされていました。
そこで両社は、遠隔操作システムにおける特定の作業について、人間が事前に行った遠隔操作データを収集し、手本となる元データをディープラーニング(深層学習)によって「AI」に学習させ、作業時動作の学習モデルを構築することで、ロボットアームが人間の操作と同様の動きを自律的に再現できることを検証しました。
検証実験の概要は以下のとおりです。
【検証手順】
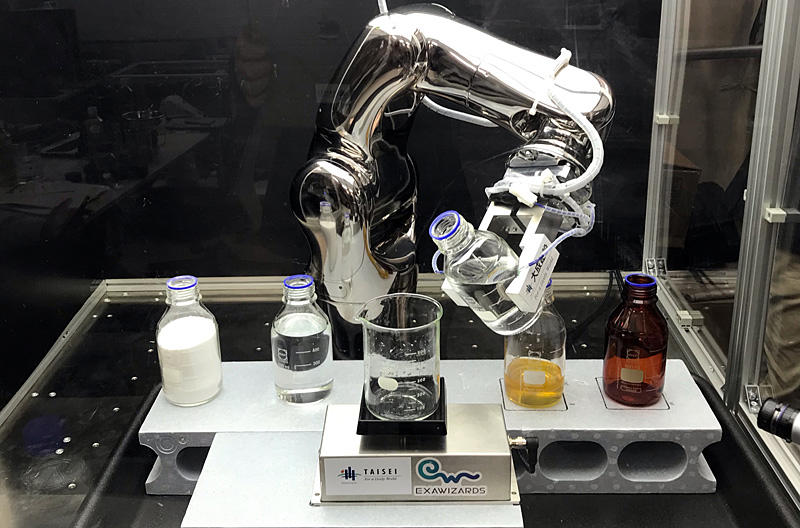
検証実験では、物体把持などの「力加減」を正確に伝える力触覚伝達提示デバイスを備えた人協働ロボット(操作側)とロボットアーム(遠隔側)を用い、広口瓶から一定量の液体をビーカーに注ぎ、液切りして瓶を元に戻すという一連の液体秤量作業について、以下のような手順で実施しました。
- 1
上記作業におけるロボットアームの動作に関する各種データ※2を、「AI」が学習するための元データとして連続的に記録・蓄積する「遠隔ダイレクトティーチング」を実施。
- 2
データ形式の異なる動作に関する上記元データを「AI」により一括学習し、一連の作業に関する学習モデルを構築。
- 3
学習モデルを用いて、ロボットアームが状況を判断して、自律的に液体秤量作業を行えるかを検証。
【検証結果】
- 1
一連の液体秤量作業について、100パターン程度の連続取得したロボットアーム動作の各種データを「AI」が一括学習し、作業時の動作を制御する学習モデルに基づき、自律的な動作を実現しました。
- 2
遠隔操作システムと「AI」の連携により、ロボットアームの自律動作が可能となるため、ロボットアームによる一連の作業工程の自動化にかかる時間と費用の大幅な削減効果が見込まれます。
今後、両社は、生産施設ほか様々な生産現場での遠隔操作システムと「AI」を活用したロボット自動化技術の実現に向け、多くの知見を集約・連携しながら、関連技術開発と社会実装への取り組みを進めてまいります。
- ※1マルチモーダルAI
人間の操作と同様の動作を行うために必要な複数のデータ要素を人間の脳のような働きをする数理モデル(ニューラルネットワーク)を用いて連動させ、これらの要素を一体化し、動作データとして認識させ、自らの判断による動作を可能とするAI。 - ※2ロボットアームの動作に関する各種データ
人間が人協働ロボットを用いてロボットアームを手動で直接操作しながら、秤量作業に関連する以下のデータを連続して取得。- ロボットアームの軸角度
- 電流負荷
- ロボットハンド開度
- 触覚センサの値
- カメラ動画
- 電子天秤の秤量値 他
- ※YouTubeにリンクしています。