コンクリート床仕上げロボット半自律制御操作システムを開発
自動運転により、作業の省力化と労働環境の改善を実現
2017年10月27日
大成建設株式会社
国立大学法人筑波大学
大成建設株式会社(社長:村田誉之)と国立大学法人筑波大学(学長:永田恭介)は、2016年に開発したコンクリート床仕上げロボット「T-iROBO Slab Finisher」の機能を拡張させ、半自律制御操作を可能とするシステムを開発しました。
ロボットの運転制御では、筑波大学システム情報系の伊達央准教授による学術指導のもと、本システムを開発・導入しており、これまでオペレーター(土間工)が常時コントローラーで操作していたロボットを、半自律制御操作により自動運転させることが可能となり、コンクリート床仕上げ作業の省力化とともに、施工での労働環境の改善を実現します。
本システムの適用に際して、施工範囲内の柱や壁などの障害物の状況に応じて、ロボットの走行範囲または走行ルートのいずれかを選択し、事前に指定する半自律制御操作を導入することにより、以降の繰り返し作業をロボットが自動で行うことが可能となります。
その特徴は、以下のとおりです。
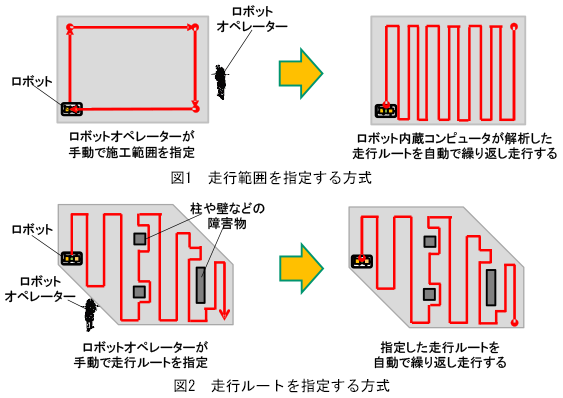
- 1走行範囲を指定する方式(図1)
初めに、オペレーターがコントローラーでロボットを走行させ、施工範囲(外周)を指定します。指定終了後にロボット内蔵コンピュータが指定範囲内における走行ルートを解析し、ロボットがそのルートを自動で繰り返し走行して床仕上げ作業を行います。この方式は、施工範囲に障害物がほとんどない単純な平面形状の工場やオフィスなどでの床仕上げ作業に適しています。 - 2走行ルートを指定する方式(図2)
初めに、オペレーターがコントローラーでロボットに走行ルートを指定します。2回目以降は、ロボットがそのルートを繰り返し辿りながら自動走行して床仕上げ作業を行います。この方式は、施工範囲内に有る障害物を回避しなければならないような複雑な平面形状の建物地下部や倉庫などでの床仕上げ作業に適しています。
今後、大成建設では、本システムが搭載されたロボットを、コンクリート床仕上げ工事を実施する建設現場に広く展開し、作業の省力化、労働環境の改善を図ってまいります。

- ※YouTubeにリンクしています。