臨場型遠隔映像システム
『T-iROBO Remote Viewer』を開発
遠隔地から安全、効率的に作業を実施
2017年1月23日
大成建設株式会社
大成建設株式会社(社長:村田誉之)は、ヘッドマウントディスプレイ(以下、HMD)を用いて、遠隔地にいながら実際に搭乗している感覚で重機を操縦できる、臨場型映像システム『T-iROBO Remote Viewer』を開発しました。
災害対応や高放射線状況下での復旧工事では、二次災害の危険を伴うことから、安全性が確保されるまでは人が立ち入れない状況となるため、現場周辺で作業することは困難です。このような状況で復旧工事などを行う場合、従来の遠隔制御システムでは、操縦者が重機に取り付けたカメラや、作業現場で重機を俯瞰する位置に設置したカメラから撮影した映像を複数モニターに表示させ重機を操縦します。しかしこの方法では、表示映像ごとに視点が変化するため、作業効率が著しく低下し、また、作業現場全体を俯瞰する位置にカメラを設置しなければならず、災害直後にカメラを設置すること自体が困難でした。
そこで、当社では、安全な遠隔地から建設作業を行うため、HMDを用いて、実際に搭乗している感覚で重機を操縦できる、臨場型映像システム『T-iROBO Remote Viewer』を開発し、実証試験を経て、その有効性を検証しました。
『T-iROBO Remote Viewer』の特徴は以下のとおりです。
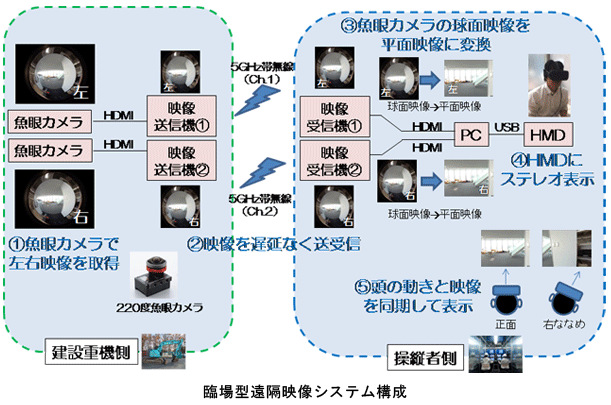
- 1重機側に設置した左右の魚眼カメラにより、一度に前方の約220度までの広域映像を取得し、専用通信機器で映像情報を遅延なく送受信するため、リアルタイムに重機側と同じ映像をHMDに表示することができます。
- 2映像による奥行きや距離感などの臨場感を再現するため、魚眼カメラはステレオ方式を採用しており、重機側で取得した球面映像を操縦者側で平面映像に変換し、HMDにステレオ表示することで、重機の先端に取り付けてあるアタッチメントなどを正確な位置に移動させることができます。
- 3重機の操縦者が見たい方向にHMDを動かすと、HMD内に表示される映像も連動して見たい方向に移動するため、重機側で取得したあらゆる方向の映像を確認しながら、効率的に作業を行うことができます。
今後、当社では、災害復旧工事に限らず、遠隔から安全で効率的な作業が求められる建築・土木工事などより多くの建設現場に本システムを適用し、機能や操作性などのさらなる向上を図り、普及展開を進めていく予定です。

- ※YouTubeにリンクしています。