GPSデータのカルマンフィルタ処理による精度向上法
計測誤差を確立的に補正する手法です。
お客様のメリット
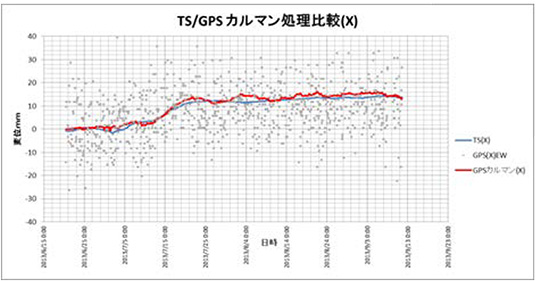
- カルマンフィルタを利用する事で観測値の安定性と信頼性の向上が図れます。
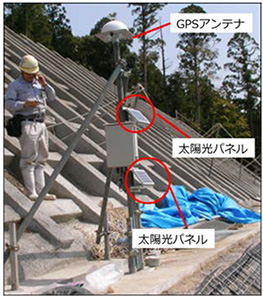
- GPS無線センサシステムは通信線および電力線は不要です。
- 他の計測データへの応用が可能で信頼性向上に期待できます。
技術の特徴
GPS無線センサシステムは太陽光発電を用いた自立給電システムの本体とその測位データを伝送する無線中継機から構成されています。GPSセンサからのデータはカルマンフィルタを用いて精度向上を図っています。
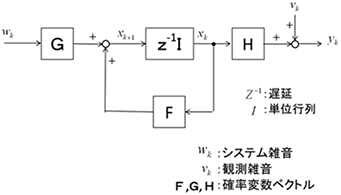
カルマンフィルタは1960年代米国で宇宙開発において実用化された技術です。カルマンフィルタは観測データを確率推定する事で信頼性と安定性を確保するものです。
ある時刻においてノイズ(雑音)の混入した時系列信号を観測した時、その背景にある量を、その時刻における測定可能な観測信号 と時系列の状態空間モデルを用いて推定することがカルマンフィルタです。
カルマンフィルタを用いる事で観測データの観測雑音を適正に選択する事ができ安定性を得る事ができます。
実績・事例
- 適用年月:2012年10月~2013年12月
- 事業名:新東名高速道路設楽原パーキングエリア工事
- 事業者名:NEXCO中日本
- 概要:観測対象は長大切土施工(高さ90m幅300m、勾配1:1.5~1.2,13段)。路線にやや斜交する数条のリニアメントや低速度帯が認められる法面挙動を監視するため地表面と地中の動態観測の適応事例。