自動化振動ローラ
「T-iROBO® Roller」
振動ローラによる転圧作業を自動で行います。
お客様のメリット
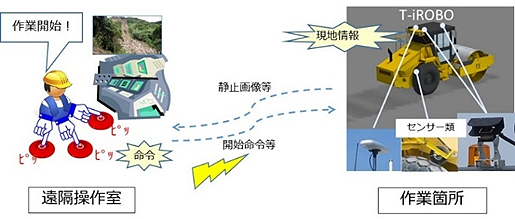
- 遠隔で作業開始操作を行うと機械が自ら判断して自動走行を行います。
- センサで状況を判断するため、夜間など視界が確保できない状況でも自動で施工ができます。
- 車載PCで自動走行の制御を行うため、通信インフラも最小限で済みます。
技術の特徴
遠隔操作型の問題点を自動走行型で解決
従来の無人化施工は、建設機械のオペレータが、現場周辺に設置する複数の動画カメラの映像を見ながら、絶えず操縦桿を操作する映像依存・ラジコン型操作です。このため、操作の熟練度、カメラ車などの支援機械、動画伝送のための高速通信網などが必要でした。
本システムは、遠隔で作業開始操作を行うと自動走行を行うため、熟練作業員の不足や苦渋作業といった問題に対応するシステムです。従来のような遠隔操作も可能です。
センサで状況判断
自動走行時にはセンサで状況を判断するため、カメラは必要ありません。そのため、夜間・濃霧・カメラの設置が困難などで視界が確保できない状況でも自動で施工を行うことができます。
最小限の通信インフラ
車載PC上のプログラムで自動走行制御を行うため、遠隔操作時に発生していた映像や操作の遅延に悩まされることがなく、通信インフラも最小限で済みます。
実績・事例

- 雲仙:2015国土交通省公募次世代インフラ用ロボット現場検証
- 濃霧や夜間の走行も検証
- 悪路面でのスリップも、迅速な進路修正
- 走行精度20cm
- 「活用を推薦する★★」の評価

- エコパークいずもざき第3期最終処分場建設工事:実施工
- エリア外では強制停止し、安全性アップ
- 方位の補正が不要
- 自動走行可能エリアの追加
- 方位センサをジャイロからGPS方位計に
- 操作画面の見直し
- 走行計画の直感的な編集が可能に
- エリア外では強制停止し、安全性アップ

- 南山造成:実証実験
- 位置センサをTSからGPSに変更
- 車外の機器削減
- TS*追尾エラーのリスクがなくなる
- 相対座標系に対応
- 桁数が大きくなり易い絶対座標から、相対座標に変更することで、把握しやすい数値に変更可能
- 位置センサをTSからGPSに変更
*TS:Total Station。光の反射を利用し、対象までの距離と方向を計測する測量機器。